This is notes which I wrote as I was taking a video lecture which is originated from
https://www.youtube.com/watch?v=Vd-gmo-qO5E&list=PLlMkM4tgfjnKsCWav-Z2F-MMFRx-2gMGG&index=5
================================================================================
 - At S, agent knows only S.
- After agent does action of moving right, environment gives agent "state" you're in state S1
================================================================================
- At S, agent knows only S.
- After agent does action of moving right, environment gives agent "state" you're in state S1
================================================================================
 - When agent moves right, environment give "reward 0" to the "agent"
- When agent reaches to goal place, environment gives agent reward 1
- When agent falls into the hole, environment gives agent reward -1
================================================================================
- When agent moves right, environment give "reward 0" to the "agent"
- When agent reaches to goal place, environment gives agent reward 1
- When agent falls into the hole, environment gives agent reward -1
================================================================================
 - Suppose agent is in s (top left)
- Suppose there is Q mentor
- And agent asks Q mentor that where I should go to from the options; left, right, top, bottom.
================================================================================
- Suppose agent is in s (top left)
- Suppose there is Q mentor
- And agent asks Q mentor that where I should go to from the options; left, right, top, bottom.
================================================================================
 - Q mentor says "I know every good and bad paths because I have walked through all paths (L,R,U,D) at state s"
Q mentor says if you go to right, you will get 0.5 score
Q mentor says if you go to bottom, you will get 0.3 score
================================================================================
Q-function
State-action value function
Q(state,action)
Input to Q: state (agent is being in) and action (agent would like to do)
Output from Q: quality wrt given state and action
================================================================================
- Q mentor says "I know every good and bad paths because I have walked through all paths (L,R,U,D) at state s"
Q mentor says if you go to right, you will get 0.5 score
Q mentor says if you go to bottom, you will get 0.3 score
================================================================================
Q-function
State-action value function
Q(state,action)
Input to Q: state (agent is being in) and action (agent would like to do)
Output from Q: quality wrt given state and action
================================================================================
 - There is Q mentor at s1
- Agent asks where I should go to to Q-mentor-staying-at-s1
- Q-mentor-staying-at-s1 says scores; 0, 0.5, 0, 0.3
- Agent finds 1. maximum value (0.5), 2. argument of maximum value (2 index)
- Agent moves to right using "index number 2"
================================================================================
$$$\max_a Q(s_1,a)$$$
$$$\max Q(s_1,a) = 0.5$$$
Variable which agent is interested in is action a,
so you should write like this
$$$\max_a Q(s_1,a)$$$
it means max value from $$$Q(s_1,a)$$$ by manipulating variable action a
================================================================================
"Argument a" when Q is maximum
$$$\arg_a \max Q(s_1,a) \rightarrow \text{Index 2: RIGHT}$$$
================================================================================
Policy is represented generally by $$$\pi$$$
$$$\pi^{*}(s) = \arg_a \max Q(s,a)$$$
$$$\pi^{*}$$$: optimal policy
It means argument a which has max Q
Actions: left, right, bottom, up
Policy: $$$\pi^{*}(s) = \arg_a \max Q(s,a)$$$
for example, "go right"
================================================================================
So far, you just supposed there would be Q mentor
Then, you should have a question about how you can train that Q mentor
to make Q mentor to say more precise guide for the agent?
================================================================================
This is the sentence which you just should believe as kind of axiom
"When agent is at state s, there is Q mentor at $$$s^{'}$$$ state,
and Q mentor knows $$$Q(s^{'},a^{'})$$$"
================================================================================
- There is Q mentor at s1
- Agent asks where I should go to to Q-mentor-staying-at-s1
- Q-mentor-staying-at-s1 says scores; 0, 0.5, 0, 0.3
- Agent finds 1. maximum value (0.5), 2. argument of maximum value (2 index)
- Agent moves to right using "index number 2"
================================================================================
$$$\max_a Q(s_1,a)$$$
$$$\max Q(s_1,a) = 0.5$$$
Variable which agent is interested in is action a,
so you should write like this
$$$\max_a Q(s_1,a)$$$
it means max value from $$$Q(s_1,a)$$$ by manipulating variable action a
================================================================================
"Argument a" when Q is maximum
$$$\arg_a \max Q(s_1,a) \rightarrow \text{Index 2: RIGHT}$$$
================================================================================
Policy is represented generally by $$$\pi$$$
$$$\pi^{*}(s) = \arg_a \max Q(s,a)$$$
$$$\pi^{*}$$$: optimal policy
It means argument a which has max Q
Actions: left, right, bottom, up
Policy: $$$\pi^{*}(s) = \arg_a \max Q(s,a)$$$
for example, "go right"
================================================================================
So far, you just supposed there would be Q mentor
Then, you should have a question about how you can train that Q mentor
to make Q mentor to say more precise guide for the agent?
================================================================================
This is the sentence which you just should believe as kind of axiom
"When agent is at state s, there is Q mentor at $$$s^{'}$$$ state,
and Q mentor knows $$$Q(s^{'},a^{'})$$$"
================================================================================
 - Agent will do "action a"
- Then, agent will go to "state $$$s^{'}$$$"
- And agent will get "reward r" at state s from the environment
- What you would like to know is $$$Q(s,a)$$$
(when agent is at s, when agent would like to do action a, what is the Q value?)
- Again, you should just believe following sentence
"There is Q mentor at $$$s^{'}$$$, and Q mentor knows $$$Q(s^{'},a^{'})$$$"
- Then, your question is how can you express $$$Q(s,a)$$$ by using $$$Q(s^{'},a^{'})$$$?
================================================================================
- Suppose agent is at state s
- What you would like to know is $$$Q(s,a)$$$ at state s
- If agent does "action a", agent gets state $$$s^{'}$$$ and reward r
- You supposed Q mentor knows $$$Q(s^{'},a^{'})$$$ at state $$$s^{'}$$$
- At state $$$s^{'}$$$, there are 2 values: r and $$$Q(s^{'},a^{'})$$$
- And those r and $$$Q(s^{'},a^{'})$$$ are related to $$$Q(s,a)$$$
because agent went to $$$s^{'}$$$ based on $$$\arg_a \max Q(s^{'},a^{'})$$$
- So, you can write $$$Q(s,a)=r+\max Q(s^{'},a^{'})$$$
================================================================================
- Agent will do "action a"
- Then, agent will go to "state $$$s^{'}$$$"
- And agent will get "reward r" at state s from the environment
- What you would like to know is $$$Q(s,a)$$$
(when agent is at s, when agent would like to do action a, what is the Q value?)
- Again, you should just believe following sentence
"There is Q mentor at $$$s^{'}$$$, and Q mentor knows $$$Q(s^{'},a^{'})$$$"
- Then, your question is how can you express $$$Q(s,a)$$$ by using $$$Q(s^{'},a^{'})$$$?
================================================================================
- Suppose agent is at state s
- What you would like to know is $$$Q(s,a)$$$ at state s
- If agent does "action a", agent gets state $$$s^{'}$$$ and reward r
- You supposed Q mentor knows $$$Q(s^{'},a^{'})$$$ at state $$$s^{'}$$$
- At state $$$s^{'}$$$, there are 2 values: r and $$$Q(s^{'},a^{'})$$$
- And those r and $$$Q(s^{'},a^{'})$$$ are related to $$$Q(s,a)$$$
because agent went to $$$s^{'}$$$ based on $$$\arg_a \max Q(s^{'},a^{'})$$$
- So, you can write $$$Q(s,a)=r+\max Q(s^{'},a^{'})$$$
================================================================================
 $$$s_0$$$: state at time 0
$$$a_0$$$: action at time 0
$$$r_1$$$: reward at time 1
$$$s_1$$$: state at time 1
$$$a_1$$$: action at time 1
$$$r_2$$$: reward at time 2
$$$s_2$$$: state at time 2
$$$a_2$$$: action at time 2
...
$$$r_{n-1}$$$: reward at time n-1
$$$s_{n-1}$$$: state at time n-1
$$$a_{n-1}$$$: action at time n-1
$$$r_{n}$$$: reward at time n
$$$s_{n}$$$: state at time n (terminal state)
================================================================================
What agent is interested in is reward
- Especially, let's think of future reward
- Future reward is sum of all rewards
Sum of all rewards
$$$R=r_1+r_2+r_3+\cdots+r_n$$$
- Let's think of future reward at time t
$$$R_t = r_t + r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- Let's think of future reward at time t+1
$$$R_t = r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- Note that there is duplicated part $$$r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- So, you can write like this:
$$$R_t = r_t + R_{t+1}$$$
- Let's suppose $$$r_{t+1} + r_{t+2} + \cdots + r_{n}$$$ is optimal reward
which is maximal reward agent can obtain
- Then, you can write:
$$$R^{*}_t= r_t +\max R_{t+1}$$$
================================================================================
Abvoe equation becomes identical form to function which learns Q function;
$$$Q(s,a)=r+\max_{a^{'}}Q(s^{'},a^{'})$$$
r: reward which agent gets by doing action a
================================================================================
You finally get equation which can update function $$$Q(s,a)$$$
$$$\hat{Q}(s,a) \leftarrow r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$
$$$\hat{Q}(s,a)$$$: Q value at current time
$$$r$$$: reward when agent does action a
By using $$$r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$,
you update $$$\hat{Q}(s,a)$$$
================================================================================
$$$s_0$$$: state at time 0
$$$a_0$$$: action at time 0
$$$r_1$$$: reward at time 1
$$$s_1$$$: state at time 1
$$$a_1$$$: action at time 1
$$$r_2$$$: reward at time 2
$$$s_2$$$: state at time 2
$$$a_2$$$: action at time 2
...
$$$r_{n-1}$$$: reward at time n-1
$$$s_{n-1}$$$: state at time n-1
$$$a_{n-1}$$$: action at time n-1
$$$r_{n}$$$: reward at time n
$$$s_{n}$$$: state at time n (terminal state)
================================================================================
What agent is interested in is reward
- Especially, let's think of future reward
- Future reward is sum of all rewards
Sum of all rewards
$$$R=r_1+r_2+r_3+\cdots+r_n$$$
- Let's think of future reward at time t
$$$R_t = r_t + r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- Let's think of future reward at time t+1
$$$R_t = r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- Note that there is duplicated part $$$r_{t+1} + r_{t+2} + \cdots + r_{n}$$$
- So, you can write like this:
$$$R_t = r_t + R_{t+1}$$$
- Let's suppose $$$r_{t+1} + r_{t+2} + \cdots + r_{n}$$$ is optimal reward
which is maximal reward agent can obtain
- Then, you can write:
$$$R^{*}_t= r_t +\max R_{t+1}$$$
================================================================================
Abvoe equation becomes identical form to function which learns Q function;
$$$Q(s,a)=r+\max_{a^{'}}Q(s^{'},a^{'})$$$
r: reward which agent gets by doing action a
================================================================================
You finally get equation which can update function $$$Q(s,a)$$$
$$$\hat{Q}(s,a) \leftarrow r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$
$$$\hat{Q}(s,a)$$$: Q value at current time
$$$r$$$: reward when agent does action a
By using $$$r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$,
you update $$$\hat{Q}(s,a)$$$
================================================================================
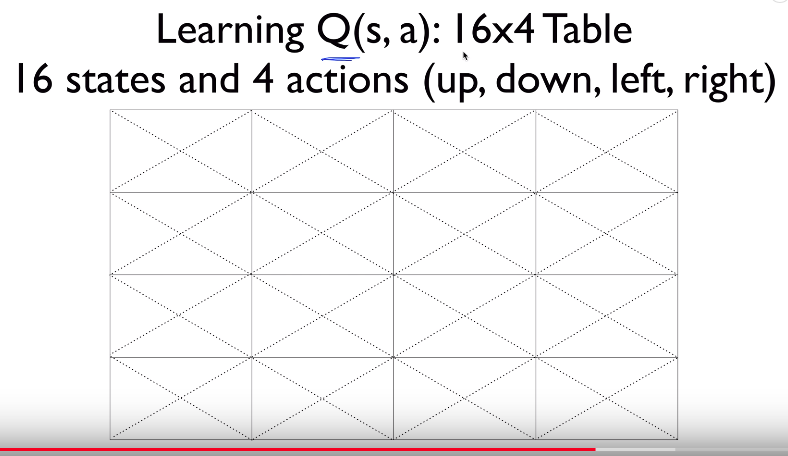 16 states
4 actions
================================================================================
16 states
4 actions
================================================================================
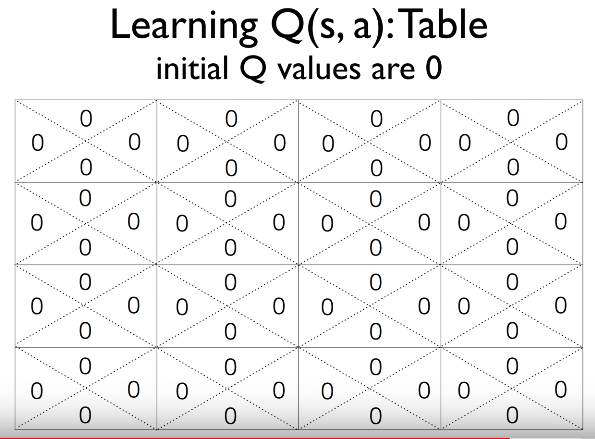 - You don't know Q values so you initialize them by 0
================================================================================
- You don't know Q values so you initialize them by 0
================================================================================
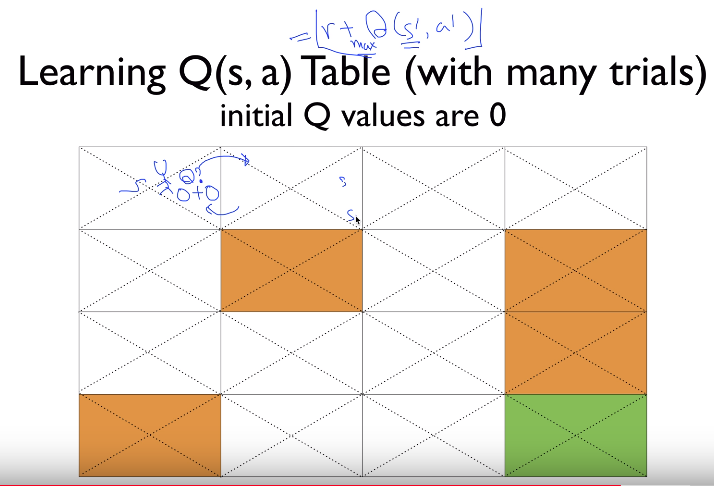 - Let's calculate Q at state s
- reward is $$$0$$$
- max Q is 0 from initially initialized $$$0,0,0,0$$$
- $$$Q(s,a)=0+0=0$$$
================================================================================
- Let's calculate Q at state s
- reward is $$$0$$$
- max Q is 0 from initially initialized $$$0,0,0,0$$$
- $$$Q(s,a)=0+0=0$$$
================================================================================
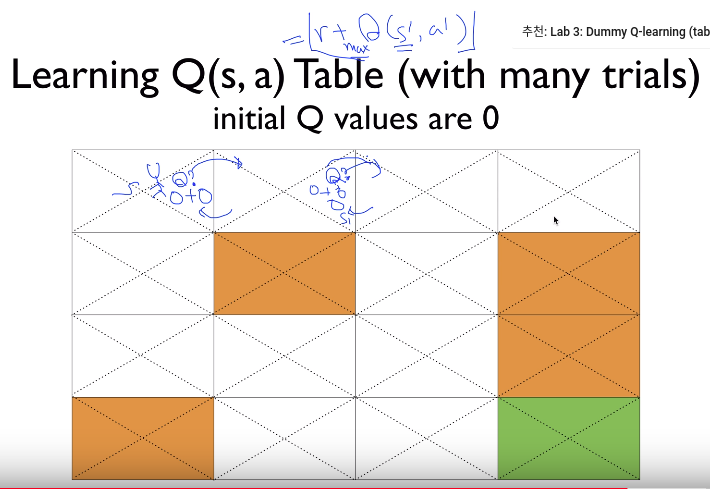 - Let's calculate Q at state s+1
- $$$Q(s_{t+1},a_{t+1})=0+0=0$$$
================================================================================
- Let's calculate Q at state s+1
- $$$Q(s_{t+1},a_{t+1})=0+0=0$$$
================================================================================
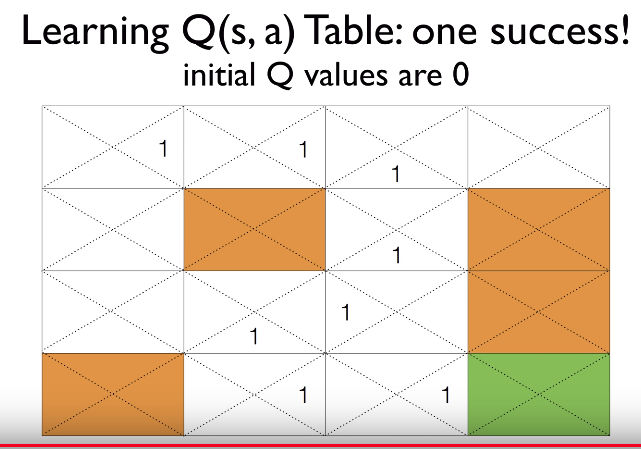
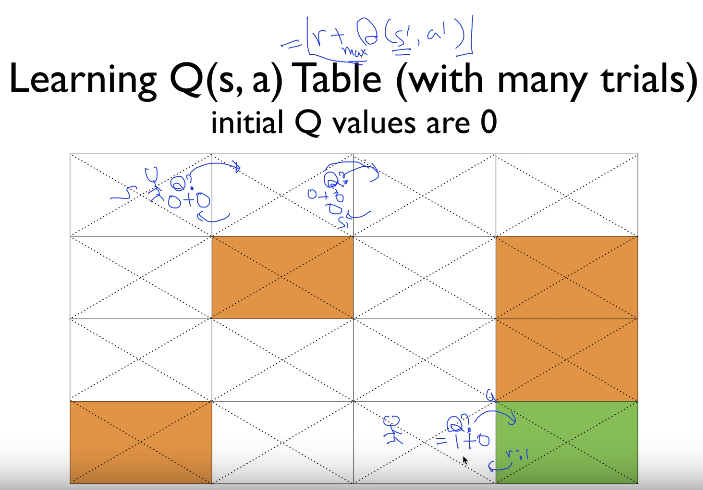 - Suppose agent is located in left from goal place
- That place Q is Q=1+0=1
- Q is updated
================================================================================
- Suppose agent is located in left from goal place
- That place Q is Q=1+0=1
- Q is updated
================================================================================
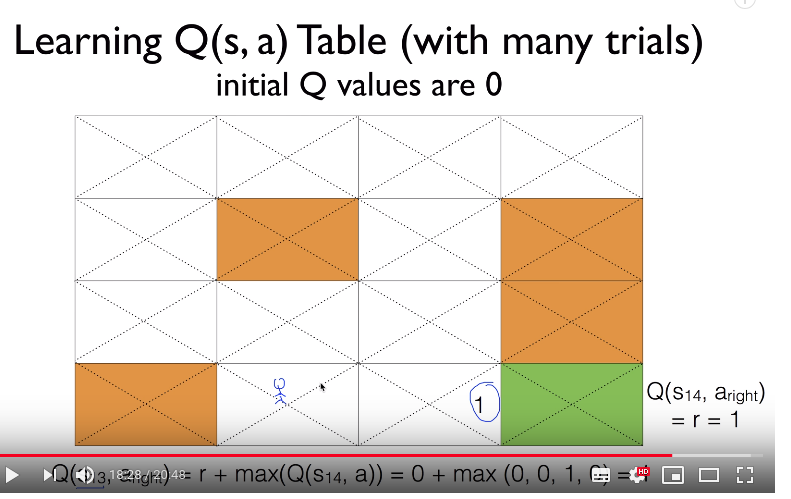 Suppose agent is at state 13
Suppose action is right
Q=0+1=1
Suppose agent is at state 13
Suppose action is right
Q=0+1=1
 ================================================================================
Q values at each place can be updated like this
================================================================================
Q values at each place can be updated like this
 ================================================================================
================================================================================
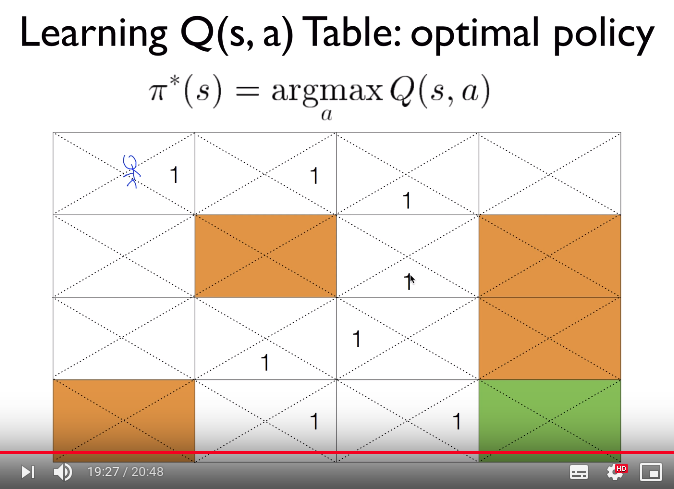 Agent can follow optimal policy at each place to arrive terminating place
================================================================================
Agent can follow optimal policy at each place to arrive terminating place
================================================================================
 Summary
- For each "s and a", you initialize table by 0
$$$\hat{Q}(s,a) \leftarrow 0$$$
- Observe current state s from environment
- Select action a and execute that action a
- Agent gets immediate reward r
- Observe new state $$$s^{'}$$$ from $$$s$$$
- Update $$$\hat{Q}(s,a)$$$ by using follow
$$$\hat{Q}(s,a) \leftarrow r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$
- Make new state $$$s^{'}$$$ into current state $$$s$$$
- Then, you can get "trained Q"
Summary
- For each "s and a", you initialize table by 0
$$$\hat{Q}(s,a) \leftarrow 0$$$
- Observe current state s from environment
- Select action a and execute that action a
- Agent gets immediate reward r
- Observe new state $$$s^{'}$$$ from $$$s$$$
- Update $$$\hat{Q}(s,a)$$$ by using follow
$$$\hat{Q}(s,a) \leftarrow r + \max_{a^{'}} \hat{Q}(s^{'},a^{'})$$$
- Make new state $$$s^{'}$$$ into current state $$$s$$$
- Then, you can get "trained Q"